
西门子数控系统-模块总代理

Siemens编程器S7-200系列用在中小型设备上的自动系统的控制单元,适用于各行各业,各种场合中的检测,监测及控制。
在这里,和大家一起来讨论S7-200几个使用方面的情况。
1.步进,伺服脉冲定位控制。
在设备的控制系统中,有关运动控制是很重要的,下面我们来看一看西门子S7-200系列PLC怎样来实现这 个功能。
首先,确定使用哪个端口来发脉冲,如采用Q0.0发脉冲,则它的控制字为SMB67,脉冲同期为SMW68,脉 冲个数存放在SMD72中,
下面是控制字节的说明:
Q0.0 Q0.1 控制字节说明
SM67.0 SM77.0 PTO/PWM更新周期值 0=不更新,1=更新周期值
SM67.1 SM77.1 PWM更新脉冲宽度值 0=不更新,1=脉冲宽度值
SM67.2 SM77.2 PTO更新脉冲数 0=不更新,1=更新脉冲数
SM67.3 SM77.3 PTO/PWM时间基准选择 0=1微秒值,1=1毫秒值
SM67.4 SM77.4 PWM更新方法 0=异步更新,1=同步更新
SM67.5 SM77.5 PTO操作 0=单段操作,1=多段操作
SM67.6 SM77.6 PTO/PWM模式选择 0=选择PTO,1=选择PWM
SM67.7 SM77.7 PTO/PWM允许 0=禁止PTO/PWM,1=允许
这样根据以上表格,我们得出Q0.0控制字:SMB67为:10000101
采用PTO输出,微妙级周期,发脉冲的周期(也就是频率)与脉冲个数都要重新输入。10000101转化为 16进制 为85,有了控制字以后,我们来写这一段程序:

根据上面这段程序,我们知道了控制字的使用,同时也知道步进电机的脉冲周期与冲个数的存放位置(对 Q0.0来说是SMW68与SMD72)。当然,VW100与VD102内的数据不同的话,步进电机的转速和转动圈数就不一样。
还有一点需要说明得是:M0.0导通---PLC捕捉到上升沿发动脉冲输出后,想停止的话,只须改变端口脉冲的 控制字,再启动PLS即可,程序如下:
2.高速计数功能。
西门子S7-200系列PLC具有高速计数的功能;举一例子来谈谈高速计数的用途,我们采用普通电机来带动丝杆转动,我们想控制转动距离,怎么来解决这个问题?那么我们可在电机另一头与一编码器联接,电机转一圈,编码器也随之转一圈,同时根据规格发出不同的脉冲数。当然,这些脉冲数的频率比较高,PLC不能用普通的上升沿计数来取得这些脉冲,只能通过高速计数功能了。
启动高速计数功能,也要具有控制字
HSCO HSC1 描述
SM37.0 SM47.0 复位有效电平控制位 0=高电平有效, 1=低电平有效
SM37.1 SM47.1 启动有效电平控制位于 0=高电平有效, 1=低电平有效
SM37.2 SM47.2 正交计数器速率选择 0=4X计数率, 1=1X计数率
SM37.3 SM47.3 计数方向控制位 0=减计数, 1=正计数
SM37.4 SM47.4 向HSC中写入计数方向 0=不更新, 1=更新计数方向
SM37.5 SM47.5 向HSC中写入预置值 0=不更新, 1=更新预置值
SM37.6 SM47.6 向HSC中写入当前值 0=不更新, 1=更新当前值
SM37.7 SM47.7 HSC允许 0=禁止HSC, 1=允许HSC
参照上面的表格,我们选择HSC1高速计数器,控制字为SMB47,现在我们启动高速计数器HSC1,选择为增计数,更新计数方向,重新设置值,更新当前值:这样的话,HSC1的启动控制高为:11111000转化为16进制为 F8,将启动计数器时当前值存放在SMD48中,将预存置放在SMD52中,具体的程序 如下:
同样的,如果计数器在工作状态下想停止计数器,也必须改变它的控制字后,启动HSC具体程序 如下:
3. PID回路控制功能。
西门子S7-200系列PLC的PID控制相当的简单,可以通过micro/win软件的一个向导程序,按照提示,一步一步执行您所要求PID控制的属性即可,在这里谈一谈PID这三个参数的具体意义:P为增益项,P越大,响应起就快,在调节流量阀时:设定流量为50%,当目前流量接近50%,刚超过,如果P值很大的话,那么流量阀会马上会关闭,而不会控制在某一区域。这就是增益项太大引起。在调节的过程中应该先将P值调节比较适当了,再去调节I值,它为积分项,是在控制器回路中控制对当前值与设定值相等的偏差范围。D为微分项,主要作用是避免给定值的微分作用而引起的跳变。
在现场的PID参数的调整过程中,针对西门子S7-200型PLC我的建议是在不同的控制阶段,采用不同的PID参数组,具体而言就是当目前距离设定值差距较大时,采用P值较大的一套PID参数,如果当前值快接近设定值范围时,采用P值较小的一套PID参数。
所谓这个电机的额定功率是指电机在工作时,在规定的电压下和一定的负载下,电机转轴上所输出的机械功率。因此我们根据额定功率的定义就可以知道,要求出电机的额定功率,只要求出电机输出功率就可以了,我记得在初中物理中学过功率的公式,P=W/t=FS/ t =Fv,在电机运行中,由于电机的转轴是按照圆周运行的,因此这个速度v就是角速度ω了,终可以推导出T=9.55P2/n,这里的T是电机的输出转矩、单位是牛·米(N·m);P2是电机的输出功率,单位是瓦(W);n是电机的转速,单位是转/分钟(r/min)。从这个式子我们可以知道,这三个两只要知道其中两个,就可以求出第三个,由于它是从普通物理式子中得出的,因此这个式子具有普遍性,它不但适用于三相异步电动机,对于其它类型的电机也可以通过这个式子求出其额定功率。
三相异步电机输入功率P1
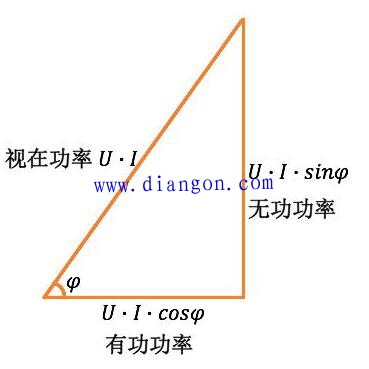
我们知道电机在运行中受到制造材料的影响,比如它是电感,因此就避免不了产生涡流,在运行中有部件之间的摩擦力也要克服、所有这些都需要电机通入电压时所产生的输入功率来克服。电机的输入功率是P1=√3*U*I*COSφ,这里的电压和电流都是在电机的额定工作状态下所用的额定电压Un和额定电流In,这个COSφ是指电机的功率因数。至于电机的视在功率S=√3*U*I和无功功率Q=I*U*sinφ它们在电机拖动工程中实际作用不大,根据功率直角三角形来看,以上的两个功率都以电机效率的形式来考虑了。
使用其它方法测电机输出功率P2
我们知道对于电机的输出功率P2可以用电能表测量电机的输入功率P1,然后用公式P2=η·P1进行计算,也可以用电压表和电流表测量电动机运行时的线电压U和线电流I,然后再用式子P2=√3·U·I·COSφ·η,但是在实际操作,这个效率η不好测量,现在我给朋友们分享一下我在工厂实习时一位老师傅告诉我的一种用日光灯测电机输出功率的方法。我们知道在交流电中日光灯每秒要闪烁100次,此时如果在电机轴端面画一条半径OA线,如下图所示。
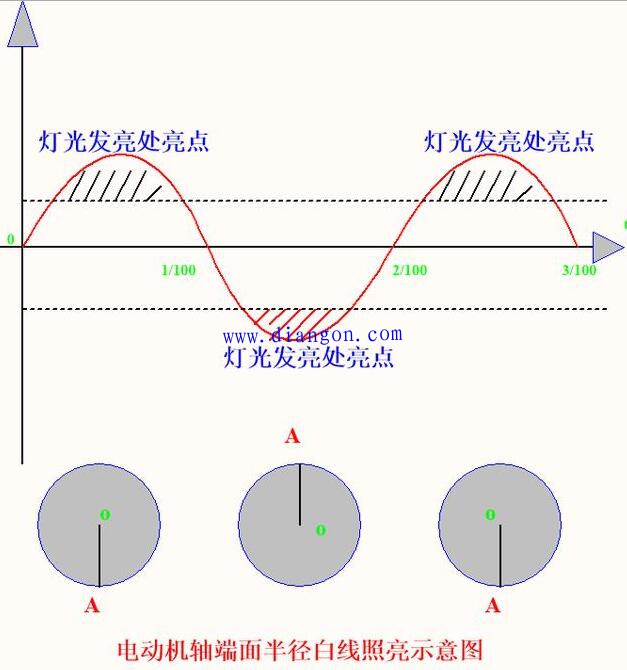
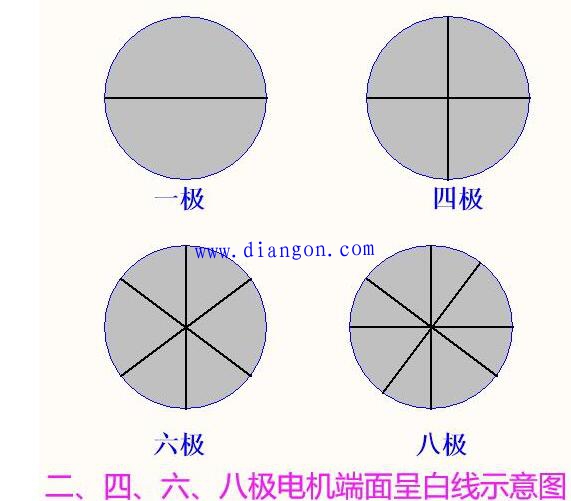
假设是两个磁极的电机,它的转速是3000r/min,也就是50转每秒,当次闪光把OA处照亮,那么会经半个周期即1/100秒,白线转过一百八十度被日光灯第二次闪光照亮。再经半个周期,白线转到原来的位置,又被日光灯第三次照亮,如此循环,此时我们就可以看到电机轴端面半径白线就成了一条直径白线。对于四极、六极、八极电机类似,如下图所示。
当电动机低于同步转速,二极电动机在日光灯第二次闪光时,白线OA转动角度要比一百八十度小,好似倒退了一些。当第三次、第四次日光灯闪光时,白线位置一次比一次后退,看起来好像逆着电机倒转一样,如果一分钟白线在某个位置出现120次,则说明两极电动机倒转120/2=60转,同样如果在一分钟出现a次,那么n极电动机白线倒转a/N转,这时我们可以带入负荷率公式β=P2/P1=a/N(n1-a/N)(U/380)^2/(n1-ne)ne,这里的n1是同步转速,ne是额定转速。只要知道了β和额定功率P1,也就求出了输出功率P2了。
- 西门子触摸屏-模块总代理 2023-10-26
- 西门子伺服电机-模块总代理 2023-10-26
- 西门子交换机-模块总代理 2023-10-26
- 西门子变频器-模块总代理 2023-10-26
- 西门子电线电缆-模块总代理 2023-10-26
- 西门子cpu模块-模块总代理 2023-10-26
- 西门子plc模块-模块总代理 2023-10-26
- 西门子一级-模块总代理 2023-10-26
- 西门子驱动器-模块代理 2023-10-26
- 西门子低压电器-模块代理 2023-10-26
- 西门子低压-模块代理 2023-10-26
- 西门子数控系统-模块代理 2023-10-26
- 西门子触摸屏-模块代理 2023-10-26
- 西门子伺服电机-模块代理 2023-10-26
- 西门子交换机-模块代理 2023-10-26
联系方式
- 地址:上海杨浦 上海市松江区广富林路4855弄88号3楼
- 邮编:200093
- 电话:15821971992
- 经理:聂聪
- 手机:15821971992
- 传真:021-33556143
- QQ:2724917714
- Email:2724917714@qq.com