

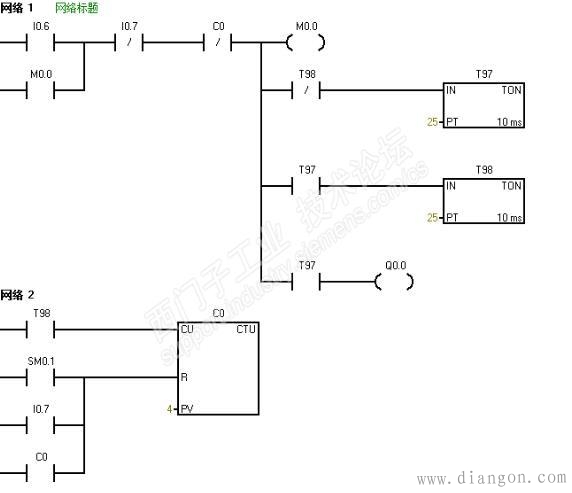
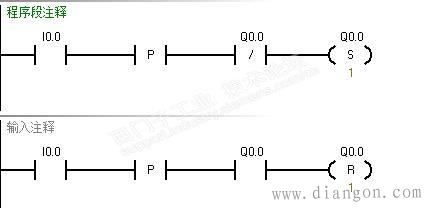
| 操作定时器,包括使能位、直接赋定时值、R指令复位等,指令执行后立即生效,不是等到系统刷新时。 这和系统对定时器的刷新机制不冲突,也不矛盾的。 读定时状态位、当时定时值,读到的就是*新鲜的值,包括由操作定时器指令立即产生的结果。但读指令本身不会改变定时器的状态。 前几天看到一个提问是这样的 问为什么C0不计数?而把网络1和网络2交换就可以了?
|
将PC中编写的程序传送给plc称为下载,将PLC中的程序传送给PC称为上载。 1.下载程序 程序编译后,就可以将编译好的程序下载到PLC。程序下载的方法是:执行菜单命令“文件→下载”,也可单击工具栏上的“ 程序下载应让PLC应处于“STOP”模式,程序下载时PLC会自动切换到“STOP”模式,下载结束后又会自动切换到“RUN”模式,若希望模式切换时出现模式切换提示对话框,可勾选对话框右下角两项。 2.上载程序 当需要修改PLC中的程序时,可利用STEP 7 - Micro/WIN软件将PLC中的程序上载到PC。在上载程序时,需要新建一个空项目文件,以便放置上载内容,如果项目文件有内容,将会被上载内容覆盖。 上载程序的方法是,执行菜单命令“文件→上载”,也可单击工具栏上的“ |
| 数据块用来存放用户程序使用的共享数据,DBX是数据块中的数据位,DBB、DBW和DBD分别是数据块中的数据字节、数据字和数据双字。 背景数据块用来为FB(功能块)提供参数,DIX是背景数据块中的数据位,DIB、DIW和DID分别是背景数据块中的数据字节、数据字和数据双字。 DI和DB是两个plc寄存器的区别码。DB表示的是共享数据。DI表示的是背景数据。背景数据块一般只能用作调用它的FB里,但DI也可以打开和共享使用,只是使用的位置只能是独立于打开它的那个块里,而且只能打开唯一的DI。不能像DB数据打开一样用作全局共享。 |
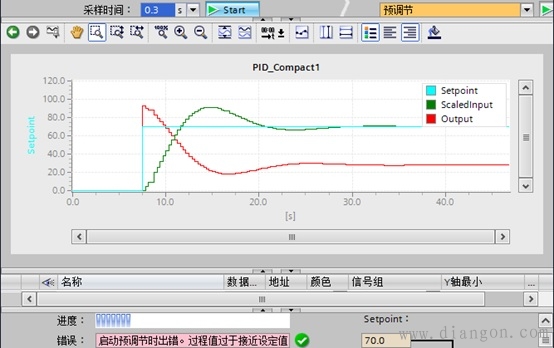
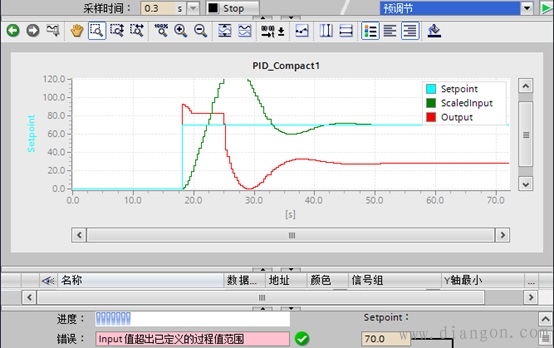
| 个人认为S7-200和200 SMART的PID参数自整定是很好用的。在阶跃响应曲线几乎和给定值水平线重合时启动自整定。首先计算自整定需要的“滞后”计算,计算完成后开始自调节,调节算法完成后,进入正常的PID控制。 S7-1200/1500的参数自整定分为预调节和**调节两个阶段。预调节要求 1)设定值和过程值均在组态的极限值范围内。 2)设定值和过程值的差值的**值应大于过程值上、下限之差的30%,还应大于设定值的50%。 我用CPU 1516C做与调节实验时与到两个问题。在70%阶跃的给定值产生之后,启动预调节,出现“过程值过于接近设定值”的错误信息(见下图)。其原因是启动的滞后时间较大,过程值上升到接近设定值了。 为了解决这个问题,在产生阶跃设定值后,立即启动预调节,解决了这个问题。
|

- 西门子6SL3055-0AA00-4BA0 2023-10-26
- 西门子6SL3040-0MA00-0AA1 2023-10-26
- 6SL3055-0AA00-3PA1 2023-10-26
- 6SL3055-0AA00-3AA1 2023-10-26
- 6SL3040-0PA01-0AA0 2023-10-26
- 6SL3040-0PA00-0AA1 2023-10-26
- 6SL3055-0AA00-5CA2 2023-10-26
- 6SL3055-0AA00-5BA1 2023-10-26
- 6SL3055-0AA00-5AA0 2023-10-26
- 6SL3040-1MA00-0AA0 2023-10-26