

MPI,I是多点接口(Multi Point Interface)的简称,是西门子公司开发的用于plc之间通讯的保密的协议。MPI通讯是当通信速率要求不高、通信数据量不大时,可以采用的一种简单经济的通讯方式。MPI通信一般常见是使用PLC S7-200/300/400、操作面板TP/OP及上位机MPI/PROFIBUS通信卡,如CP5512/CP5611/CP5613等进行数据交换。MPI网络的通信速率为19.2Kbps~12Mbps,*多可以连接32个节点,*大通讯距离为50m,但是可通过中断器来扩展长度。 MPI是多点接口(Multi Point Interface)的缩写,MPI的物理层是RS-485,*大传输速率为12Mbit/s,默认的传输速率为187. 5kbit/s。两个相邻节点间的*大传送距离为50m,加中继器后为1000m,使用光纤和星形连接时*长为23. 8km。 S7-300 CPU集成的第1个通信接口是MPI接口,S7-400 CPU集成的第1个通信接口可以设置为MPI接口或DP接口。PLC通过MPI能同时连接运行STEP 7的编程器/计算机(PG/ PC)、人机界面(hmi)及其他SIMATIC S7、M7和C7。该通信接口还有全局数据(简称为GD)通信、S7基本通信和S7通信服务功能。 计算机应插一块MPI卡,或使用PC/MPI、USB/MPI适配器连接计算机和S7 CPU。位于网络终端的站,应将其连接器上的终端电阻开关合上,以接人终端电阻。 下面用一个例子来介绍对MPI网络组态的方法。在STEP 7中生成一个名为MPI_ GD的项目。首先在SIM ATIC管理器中生成3个站,对它们的硬件组态,它们的CPU分别为CPU 413-1、CPU 313C和CPU 312C。点击SIMATIC管理器的工具条上的
图1 已连接好的MPI网络 双击某个站的CPU方框中的小红方块,打开MPI接口属性对话框(见图2),用鼠标选中“参数”选项卡的“子网”列表框中的“MPI (1)”,该行的背景变为深蓝色,点击“确定”按钮,CPU被连接到MPI(1)子网上。选中“不连网”后点击“确定”按钮,将断开CPU与MPI(1)子网的连接。点击“确定”按钮返回NetPro,可以看到该CPU是否连接到MPI网络。
图2 MPI接口属性组态 也可以将图1的CPU方框中的小红方块“拖放”到MPI网络上,该站便被连接到网络上了,这是一种相当方便的实现连接的方法。也可以用“拖放”的方法断开连接。 应为每个MPI节点设置MPI地址(0~126),编程设备、人机界面和CPU的默认地址分别为0、1、2。可以在“参数”选项卡(见图2)设置MPI站地址,一般可以使用系统指定的地址,各站的MPI地址应互不重叠。 点击图2中的“新建”按钮,可以生成一条新的子网。点击“删除”按钮,可以删除选中的“子网”列表框中的子网。 点击“属性”按钮,在打开的对话框中,可以设置选中的子网的属性,例如在“常规”选项卡中修改子网的名称和编号,在“网络设置”选项卡中设置子网的传输速率。点击多选框“改变”,出现“√”后,可以设置*高站地址,一般采用系统默认的设置。 |
 按钮,打开网络组态工具NetPro,出现了一条自动生成的标有MPI(1)的网络,和没有与网络相连的3个站的图标,图1是已经连接好的MPI网络。
按钮,打开网络组态工具NetPro,出现了一条自动生成的标有MPI(1)的网络,和没有与网络相连的3个站的图标,图1是已经连接好的MPI网络。

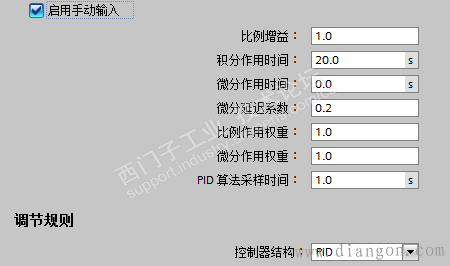
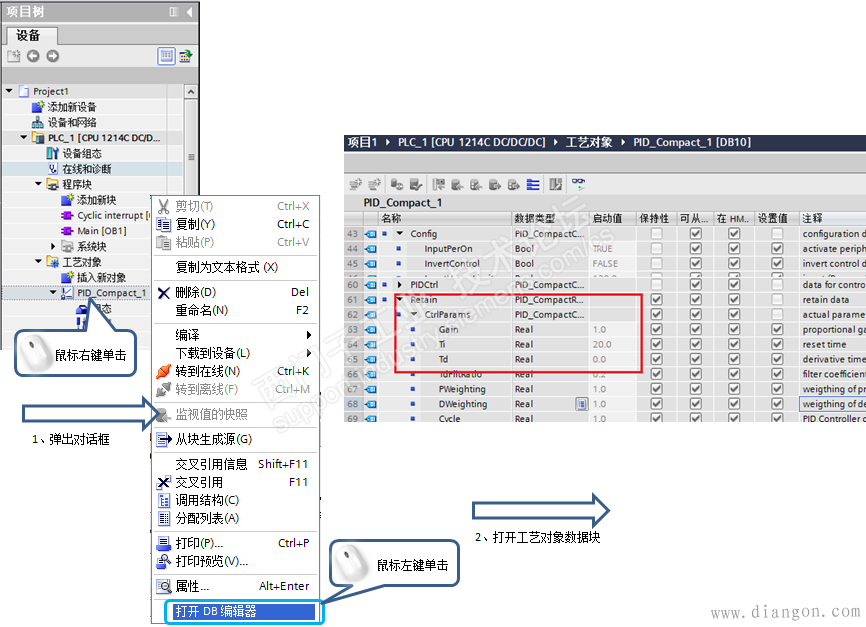
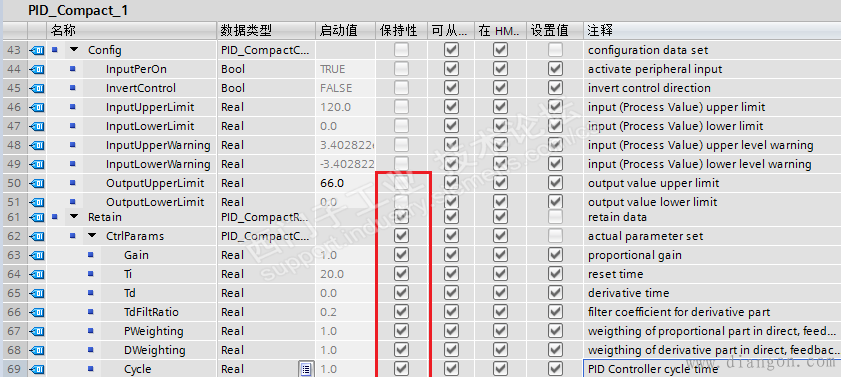
| 1、激活“手动输入”后可以在此对话框中修改PID参数,须重新下载PID组态。因为工艺对象背景数据块的数据结构未发生变化,需要CPU从STOP到RUN后才生效。 2、或者通过其他途径修改参数,可直接在PID的背景数据块里修改相应参数,参数实时生效,且不需要从新下载或STOP-RUN。PID的增益积分微分这几个参数具有保持性,不用担心断电会丢失,操作如下:
|


- 6SL3055-0AA00-3AA1 2023-10-26
- 6SL3040-0PA01-0AA0 2023-10-26
- 6SL3040-0PA00-0AA1 2023-10-26
- 6SL3055-0AA00-5CA2 2023-10-26
- 6SL3055-0AA00-5BA1 2023-10-26
- 6SL3055-0AA00-5AA0 2023-10-26
- 6SL3040-1MA00-0AA0 2023-10-26
- 6SL3055-0AA00-4BA0 2023-10-26
- 6SL3040-0MA00-0AA1 2023-10-26
- 西门子输出电抗器6SE7032-6ES87-1FE0 2023-10-26