
6ES7223-1PH22-0XA8现货包邮






系统变量#3007 用于坐标轴镜像状态检查, 该变量只能读, 不能写。 镜像检测信号见图。

设定位 =0, 镜像无效; 设定位 =1, 镜像有效。 例如, #3007 =3, 则第 1 轴和第 2 轴镜像有效。
使用外部开关或设定 (SETTING) 操作所设定的镜像状态可通过#3007 (镜像检测信号) 读出。 所得到的二进制值被转换为十进制。
系统变量#3005 与某些系统基本配置的设定相关, 见图。
#9 (FCV): 使用 FS16/18 兼容格式或 FS10/11 纸带格式。
#5 (SEQ): 是否自动插入顺序号。
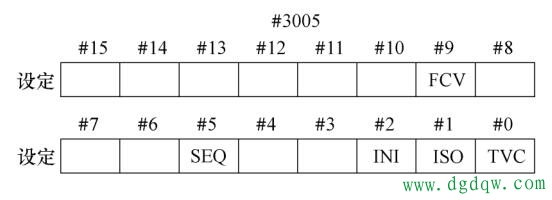
图 设定数据#3005
#2 (INI): 公制输入还是英制输入。
#1 (ISO): 用 EIA 码还是 ISO 码输出代码。
#0 (TVC): 是否进行 TV 校验。
通过对#3005 赋值, 可以对设定功能进行设定。 用二进制来表示#3005 的值时, 各位与各设定功能相对应。 设定时, 用十进制赋值。
若执行#3005 =34, 则设定数据建立如下。
FCV =0: 使用 FS16/18 兼容格式。
SEQ =1: 自动插入顺序号。
INI =0: 公制输入。
ISO =1: 数据输出时的代码格式为 ISO 代码。
TVC =0: 不进行 TV 检查。
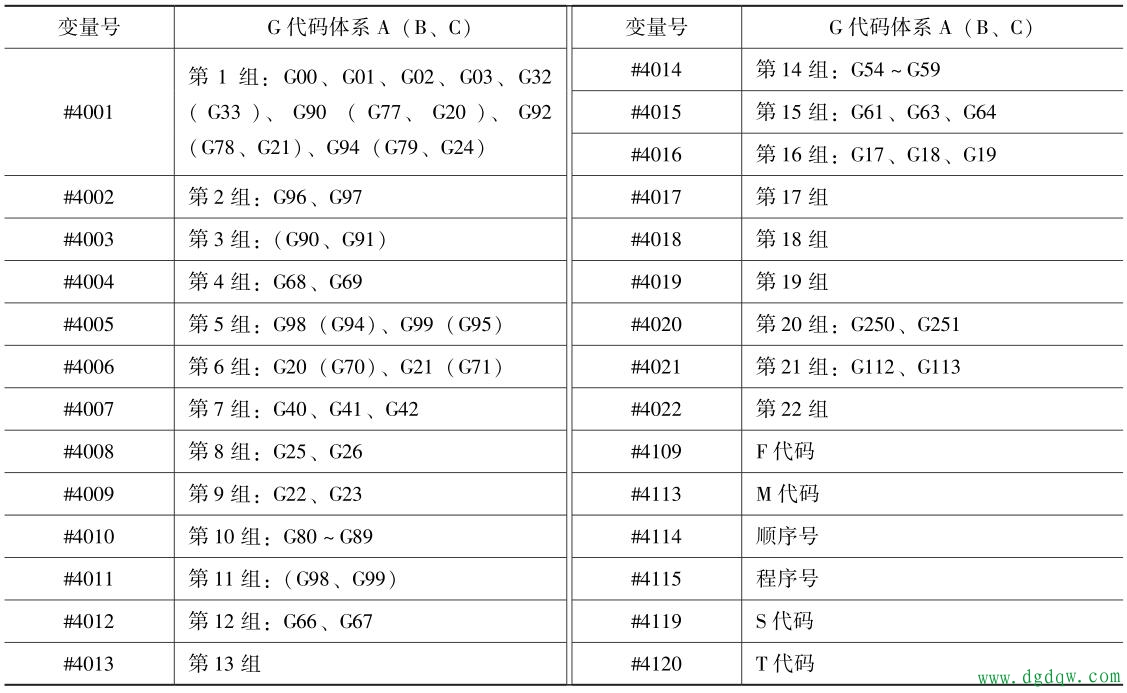
4000 系列的系统变量是存储模态信息的变量, 见表。 #4001 ~ #4022 分别对应第1 ~22 组G 代码的模态信息。 00 组 G 代码是非模态, 因此, 无相应模态信息系统变量。 其他代码的保存区域是#4102 ~ #4130。 保存当前模态信息的主要目的是保证编写宏程序的安全。 如: 在主程序或宏程序的调用程序中使用 G54 工件坐标系, 在宏程序中使用 G55 工件坐标系, 如果不采取模态信息的保存与恢复操作, 当宏程序调用返回时, G55 工件坐标系继续有效, 这是非常危险的。 因此,良好的编程习惯是进入宏程序, 则立即保存相关重要模态信息, 在退出宏程序之前, 再将保存的模态数据恢复, 以便在随后的程序运行中使用。 例: 执行#1 = #4001 时, #1 中的值为 0、 1、 2、 3、 33 或 34。 例: 增量值和**值混合编程时, 镗孔循环 (相当于 G86)。 宏程序调用指令: G65 P9086 R — Z — F — L — ; 变量定义如下。 #18: 从初始平面到 R 平面的距离。 #26: 从 R 平面到切削深度的距离。 #9: 进给速度
表 模态信息变量 宏程序编程如下。 O9086; N1 #1 = #4003; 保存 03 组 G 代码 N2 #3003 =1; 禁止单程序段停止 N3 #2 = ABS[#18]; N4 #3 = ABS[#26]; N5 G91 G00 Z - #2; 定位到 R 平面 N6 G01 Z - #3 F#9; 镗孔进给 N7 M05; N8 G00 Z[ROUND[#2] + ROUND[#3]]; N9 M03; N10 #3003 =0; 恢复单程序段停止 N11 G#1; 恢复 03 组 G 代码 N12 M99; |

联系方式
- 地址:上海杨浦 上海市松江区广富林路4855弄88号3楼
- 邮编:200093
- 电话:15821971992
- 经理:聂聪
- 手机:15821971992
- 传真:021-33556143
- QQ:2724917714
- Email:2724917714@qq.com