| 在STEP7中的库中,有专门用于PID控制的FB块——FB41。PID控制必须在循环中断中执行,以确保其扫描、执行时间基本固定。本例中的CPU仅有OB35一个循环中断,因此,要在OB35中调用FB41。 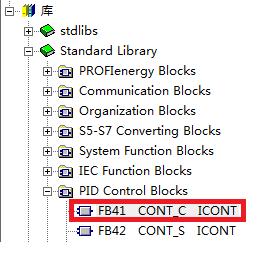
图1 FB41在库中的位置
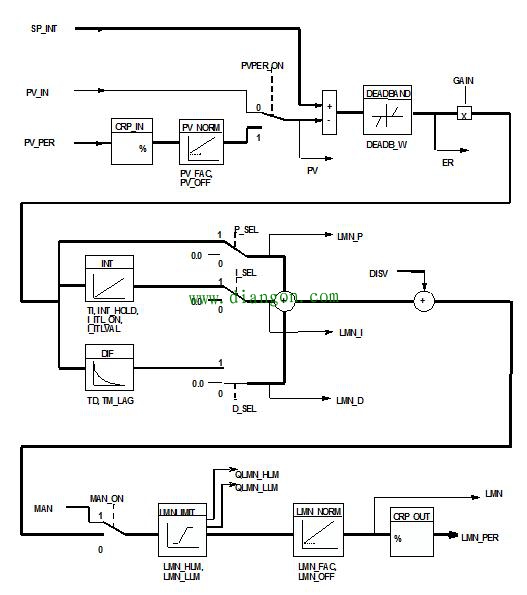
图2 FB41的逻辑图
FB41的逻辑如图2所示。分解介绍如下:
· SP_INT端为给定值,本例中即为给定压力,假设为0.5MPa;即:0.5==>"SP_INT";
· 实际值有两条通路可选:
· 当PVPER_ON=0时,PV_IN端的值为实际值,该值通常有FC105转换而来;
· 当PVPER_ON=1时,PV_PER端的值为实际的压力值,该值来自AI模块,为压力传感器的反馈值;
本例中,我们以PVPER_ON=1时,来说明。即:1==>"PVPER_ON"、PIW272==>"PV_PER"
· PV_FAC、PV_OFF对应压力的范围,即:1==>"PV_FAC"、0==>"PV_OFF"。
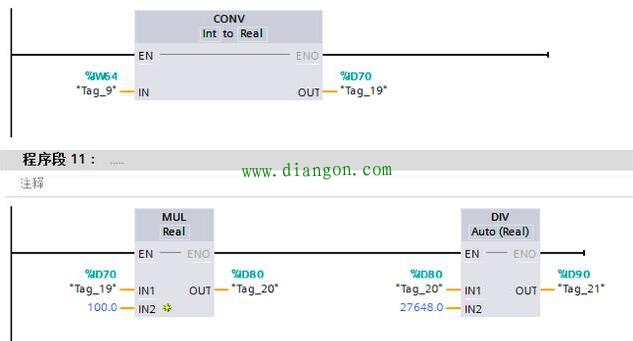
· PV是根据PV_PER计算出的实际压力值。具体来说:
PV_PER=0时,对应的实际压力为PV_OFF,即0MPa;
PV_PER=27648时,对应的实际压力为PV_FAC,即1MPa;
PV=PV_PER/27648*(PV_FAC – PV_OFF),本例中,PV=PV_PER/27648;
· ER为给定值SP_INT和实际值PV的偏差,PID即是基于它进行调节的;
· GAIN、TI、TD分别为比例、积分、微分的系数。比例功能投入与否,由P_SEL决定,当P_SEL=1时,比例功能起作用;同理,I_SEL、D_SEL决定是否启用积分、微分调节;
· LMN_P、LMN_I、LMN_D分别记录当前控制量的比例分量、积分分量、微分分量。
· LMN_HLM、LMN_LLM分别为输出的上、下限值,上限100对应50Hz,下限0对应0Hz,所以:LMN_HLM=100/50=2;LMN_LLM=0;
· LMN_FAC、LMN_OFF标定频率的变化范围,分别为50Hz和0Hz;
· LMN_PER为输出的标准化,LMN_PER=LMN/100*27648;
FB41中还有其他参数,本文仅对PID控制做简单介绍,上述几个参数是必须了,将其定义在DB1中,如图3所示。然后在OB35中,调用FB41,并将DB1中的数据一一对应的填入相应的引脚,即完成了PID控制的基础工作,如图4所示。

图3 FB41关键参数定义
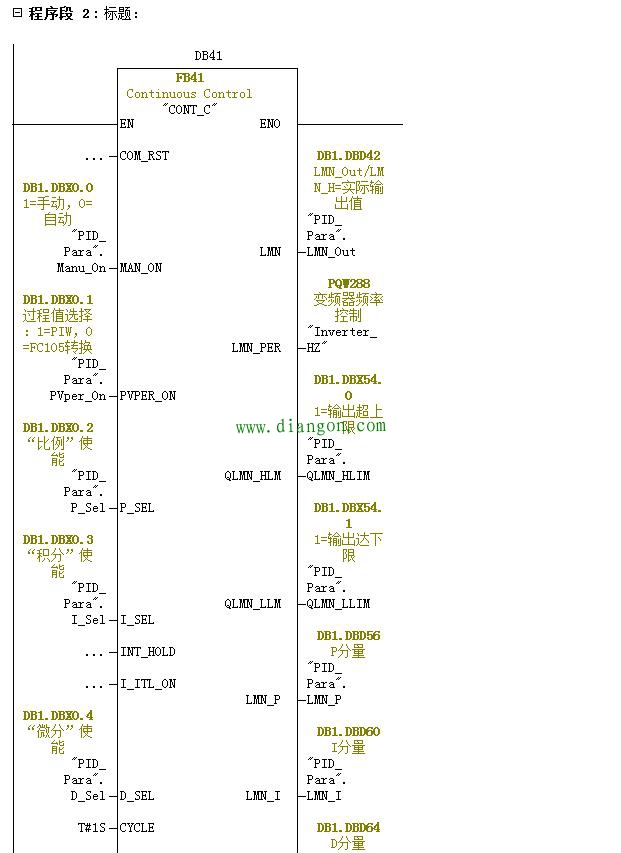
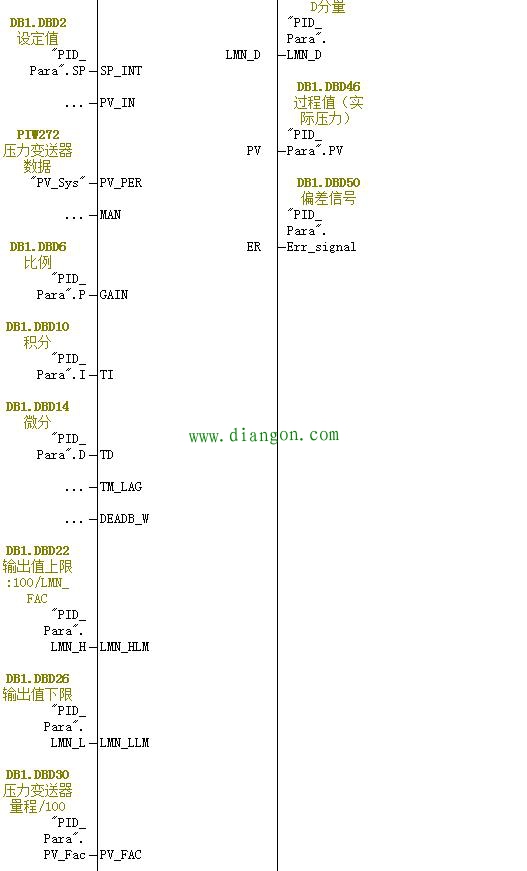

图4 OB35中调用FB41
|