
西门子电缆6XV1840-2AH10

串联型开关电源工作原理
串联型开关电源如下图:
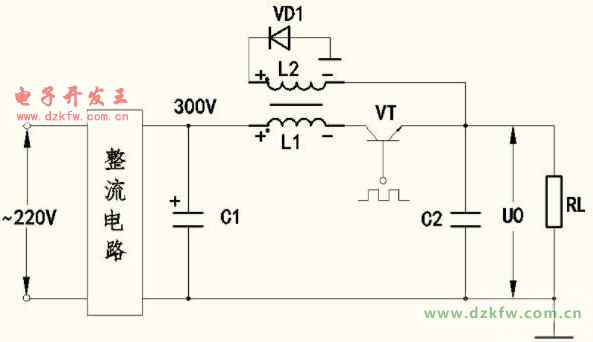
图1:串联型开关电源
220V交流市电经整流和CI滤波后,在C上得到300V直流电压(市电电压为220V时,整流后大值可达到220√2V=311V,此处300V直流电压指近似值),该电压经绕组L 1送到开关管VT的集电极。
开关管VT的基极加有脉冲信号,当脉冲信号高电平送到VT的基极时,VT饱和导通,300V的电压经L1、VT的集电极和发射极对电容C2充电,在C2上充得上正、下负的电压,充电电流在经过L1时,L1会产生左正、右负的电动势阻碍电流,L2上会感应出左正、右负的电动势(同名端极性相同),续流二极管VD1截止;当脉冲信号低电平送到VT的基极时VT截止,无电流流过L1,L1马上产生左负、右正的电动势,L2上感应出左负、右正的电动势,二极管VD1导通,L2上的电动势对C2充电。
充电途径为:L2的右正→C2→地→VD1→L2的左负,在C上充得上正、下负的电压Uo,供给负载RL。稳压过程∶若市电电压下降,C1两端电压也会下降,如果VT基极的脉冲宽度不变,在VT导通时,充电电流会因供电电压下降而减小,C2充电少,两端的电压U会下降。
为了保证在市电电压下降时C,两端的电压不会下降,可让送到VT基极的脉冲信号变宽(高电平持续时间长),VT导通时间长,C2充电时间长,C2两端的电压又回升到正常值。
推荐你看的:
开关电源报警的原因,开关电源报警的处理方法

遇到开关电源的故障怎么办,线路中开关电源故障报警的原因是什么,在实际的电工维护过程中,遇到开关电源故障问题,应该从哪些方面来处理,一起来了解下。
开关电源结构组成_开关电源的原理框图
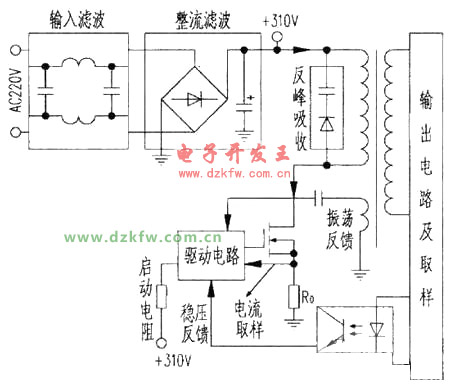
开关电源的结构组成,开关电源主要由控制电路、检测电路、辅助电源四大部份构成,开关电源的原理框图,并介绍了开关电源常见故障及检修方法。
01
概述
随着工业自动化技术的快速发展,当前的生产线、生产机械使用了大量的驱动装置。对于自动化的系统集成项目,自动化程度越来越高,需要实现的功能越来越多,设备的运行模式也是越来越复杂。因此对我们设备的制造时间、效率、质量以及灵活性等多方面提出了更有挑战性的要求。
基于以上要求,西门子提供了许多标准的驱动功能库,在项目中使用标准驱动功能库的优势在于:
可读性:基于标准化编程的一些编程技巧,编程方法,工程师可以很便捷的读懂这些标准库里面的编程内容。
可维护性:开放的库代码源文件。
灵活性:根据工程需要,灵活运用。
可重复性:将不同工程师手工打造的一个个形式各异的功能块,转换到标准化模块化的程序库,提升程序的稳定 、可靠 ,缩短调试时间,提升可重用性。
PLC 与驱动之间的循环/非循环通信功能库(Drive_Lib)***常用的五个功能块如下:
SINA_INFEED(FB288):用于控制 SINAMICS 系统的整流单元。
SINA_PARA(FB286)、SINA_PAR _ S(FB287) :通过非循环通信写入和读取多个或单个驱动参数。
SINA_POS(FB284):实现SINAMICS 驱动器的基本定位控制。
SINA_SPEED(FB285):实现SINAMICS 驱动的速度控制。
SINA_Pos:基于报文111,SINAMICS 驱动器的简易基本定位控制库文件安装到全局库中,如图1所示,本文分别对这些功能块进行介绍。

图1. Drive_Lib功能库
02
SINA_INFEED (FB288)
PLC基于标准通信报文370报文,通过功能块实现对 SINAMICS S120 整流电源模块的控制以及状态信号的监视。功能块如图2所示。

图2. SINA_INFEED功能块
功能块的输入参数:
EnablePrecharging:整流单元 ON /OFF1。
EnableInfeed:整流单元使能运行(Operation enable)。
AckError:确认整流单元故障。
ConfigAxis:以二进制编码的形式定义控制功能,参数默认为1,其中 Bit0,为OFF2 默认值等于1;Bit2 等于1表示ALM禁止电动运行;Bit3等于1表示ALM或SLM 禁止回馈运行。
从功能块的输出参数中可以得到整流单元的状态显示。
03
SINA_PARA(FB286)
SINA _PARA_S(FB287)
PLC通过非周期性通信可以实现对 SINAMICS 驱动参数的读写操作,SINA_PARA 支持单次***多16个参数的写入和读取而SINA_PARA_S 仅支持单次一个参数的读取和写入。功能块如图3所示。

图3. SINA_PARA 、SINA_PARA_S功能块
1.SINA_PARA功能块的输入参数:
Start:上升沿会启动参数操作任务。
ReadWrite:任务类型(0=读参数, 1=写参数)。
ParaNo:参数数量 → 1 到 16。
AxisNo:轴编号/轴 ID(多轴系统),V90PN 需设置为2。
在SINA_PARA的背景数据块中可对 sxParameter[1]到sxParameter[16 ] 数据结构中的相关参数进行设置。
2.SINA_PARA_S功能块的输入参数:
Start:上升沿会启动参数操作任务。
ReadWrite:任务类型(0=读参数, 1=写参数)。
Parameter:参数号。
Index:参数下标。
ValueWrite1:写入为实数的参数值。
ValueWrite2:写入为整数的参数值。
AxisNo:轴编号/轴 ID(多轴系统),V90PN需设置为2。
轴编号/轴 ID(多轴系统),V90PN需设置为2。
04
SINA_POS(FB284)
PLC基于西门子标准通信报文111报文,实现对SINAMICS驱动内部基本定位(EPOS)控制,其中八种模式可供使用分别是,模式1相对定位,模式2***定位,模式3连续位置运行,模式4回零操作,模式5设置回零位置,模式6运行程序段,模式7点动Jog,模式8点动增量。功能块如图4所示。

图4. SINA_POS功能块
这个功能块是大家在做基本定位控制时***常用的,西门子网站上有详细资料,在此不做赘述。
05
SINA_SPEED (FB285)
PLC基于标准通信报文1,可实现对驱动的速度控制及状态监控。功能块如图5所示。

图5. SINA_SPEED功能块
功能块的输入参数:
EnableAxis:驱动器使能。
AckError:确认驱动器故障。
SpeedSp:速度设定值[rpm]。
RefSpeed:额定速度(p2000) [rpm]。
ConfigAxis:二进制编码输入参数。标准分配16#003F(默认设置)。
功能块的输出参数中有速度实际值及驱动状态显示。
- 6XV1840-2AH10 2023-10-26
- 西门子以太网线6XV1840-2AH10 2023-10-26
- 西门子网线6XV1840-2AH10 2023-10-26
- 西门子6XV1840-2AH10 2023-10-26
- 西门子以太网总线代理商 2023-10-26
- 西门子以太网电缆代理商 2023-10-26
- 西门子工业网线代理商 2023-10-26
- 西门子网线代理商 2023-10-26
- 6ES7512-1DK01-0AB0详细参数 2023-10-26
- 6ES7512-1CK01-0AB0详细参数 2023-10-26
- 6ES7511-1CK01-0AB0详细参数 2023-10-26
- 6ES7511-1AK02-0AB0详细参数 2023-10-26
- 6ES7507-0RA00-0AB0参数详情 2023-10-26
- 6ES7505-0KA00-0AB0参数详情 2023-10-26
- 6ES7505-0RA00-0AB0参数详情 2023-10-26
联系方式
- 地址:上海杨浦 上海市松江区广富林路4855弄88号3楼
- 邮编:200093
- 电话:15821971992
- 经理:聂聪
- 手机:15821971992
- 传真:021-33556143
- QQ:2724917714
- Email:2724917714@qq.com