
上海西门子模块一级代理|维修保养

| 1、步距角的选择 电机的步距角取决于负载精度的要求,将负载的Zui小分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。目前市场上步进电机的步距角一般有0.36度/0.72度(五相电机)、0.9度/1.8度(二、四相电机)、1.5度/3度(三相电机)等。 2、静力矩的选择 步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。单一的惯性负载和单一的摩擦负载是不存在的。直接起动时(一般由低速)时二种负载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸) 3、电流的选择 静力矩一样的电机,由于电流参数不同,其运行特性差别很大,可依据矩频特性曲线图,判断电机的电流(参考驱动电源、及驱动电压) 4、力矩与功率换算 步进电机一般在较大范围内调速使用、其功率是变化的,一般只用力矩来衡量,力矩与功率换算如下: P= Ω·M Ω=2π·n/60 P=2πnM/60 其P为功率单位为瓦,Ω为每秒角速度,单位为弧度,n为每分钟转速,M为力矩单位为牛顿·米 P=2πfM/400(半步工作) 其中f为每秒脉冲数(简称PPS) |
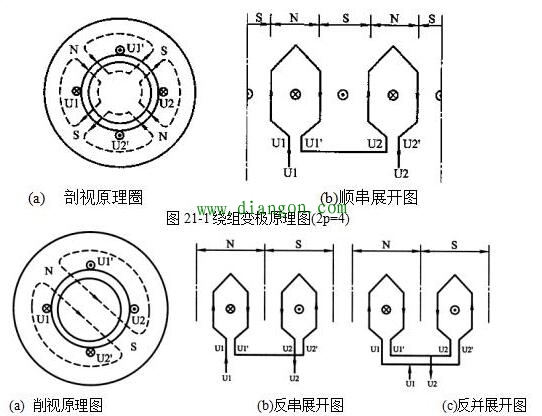
| 由三相异步电动机的转速公式n=(1–S)60f1/p可知,改变异步电动机磁极对数P,可实现电动机调速。 变极调速 在电源频率f1不变的条件下,改变电动机的极对数p,电动机的同步转速n1,就会变化,极对数增加一倍,同步转速就降低一半,电动机的转速也几乎下降一半,从而实现转速的调节。 要改变电动机的极数,当然可以在定子铁心槽内嵌放两套不同极数的三相绕组,从制造的角度看,这种方法很不经济。通常是利用改变定子绕组接法来改变极数,这种电机称为多速电机。 1变极原理 下面以4极变2极为例,说明定子绕组的变极原理。图画出了4极电机U相绕组的两个线圈,每个线圈代表U相绕组的一半,称为半相绕组。两个半相绕组顺向串联(头尾相接)时,根据线圈中的电流方向,可以看出定子绕组产生4极磁场,即2p=4,磁场方向如图(a)中的虚线或图(b)中的×、⊙所示。
|
| 测量电动机的绝缘电阻时,需要测量每两相绕组之间和每相绕组与机壳之间的绝缘电阻值,以判断电动机的绝缘性能。 (1)选用500V,500MΩ或1000MΩ的兆欧表。兆欧表与电动机的连线不能用双股线,必须用单股线分开单独连接,以免引起误差。 (2)测量前先对兆欧表进行一次开路和短路试验,检查兆欧表是否正常。 (3)在测量前,必须切断三相交流电动机的电源。先打开电动机的接线盒,里面有6个接线柱。三相电动机分三角形和星形两种接法,拆开连接铜片时要记住是哪种接法,然后用wanneng表R×1k挡在接线柱上找出三个同相绕组,一般是上下斜对角的。 (4)测量时,将兆欧表置于水平位置。手摇发电机应由慢到快,转速达到120r/min时保持匀速,使指针稳定。同时注意防止触电。摇动过程中,当出现指针已指零时,就不能再继续摇动,以防表内线圈发热损坏。 (5)分别测量A、B、C相对电动机外壳,以及A、B、C两两之间的绝缘电阻,共6次的绝缘电阻均≥0.5MΩ为合格;如果有某个绝缘电阻低于0.5MΩ,则为不合格。 注意:接地的接线柱E应接到机壳上无绝缘的地方。在热状态( 75℃)条件下,一般中小型低压电动机的绝缘电阻值应不小于0.5MΩ;高压电动机每千伏工作电压定子的绝缘电阻值应不小于1MΩ;每千伏工作电压绕线式转子绕组的绝缘电阻值Zui低不得小于0.5MΩ;电动机二次回路绝缘电阻应不小于1MΩ。 |
展开全文
相关产品
