

| 1、配电室全部机电设备,由配电室人员负责管理和值班,停送电由值班电工操作,非值班电工禁止操作,无关人员禁止进入配电室;公司内有关上级部门因检查工作,必须要进入这些场所时,应由工程主管或其指定人员陪同,并通知当值领班开门后进入,同时在《机房出入登记表》上做好记录。 2、保持良好的室内照明和通风,室内温度控制在35度以下。 3、建立运行记录,每班至少巡查一次,每季组织检查一次,每年大检修一次,查出问题及时修理,不能解决的问题及时报项目部经理。 4、每班巡查内容:室内是否有异味,记录电压,电流,温度,电表数;检查屏上指示灯、电器运行声音、补偿柜运行情况,发现异常及时修理与报告。 5、供电线路操作开关部位应设明显标志,检修停电拉闸必须挂标志牌,非有关人员决不能动。 6、室内禁止乱拉乱接线路,供电线路严禁超载供电,如确需要,报管理人员书面同意方可进行。 7、严禁违章操作,检修时必须遵守操作规程,使用绝缘工具、鞋、手套等。 8、配电房每周清扫一次、保持室内清洁,防止动物进入配电室。 9、配电室的应急照明、灭火器材应保持完好。 10、认真做好值班记录,认真执行交接班制度。 |
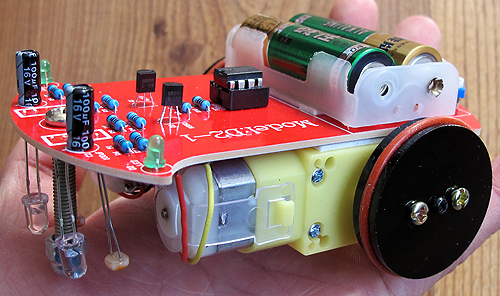
KC智能循迹小车 寻迹小车 附电路图含制作方法:
随着素质教育的越来越被重视,很多学校都把制作智能小车作为**课题,智能小车生动有趣还牵涉到机械结构、电子基础、传感器原理、自动控制甚至单片机编程等诸多学科知识,学生通过动手实践能大大提高解决实际问题的能力,而且智能小车还是一个很好的硬件平台,只要增加一些控制电路就能完成循迹小车、救火机器人、足球机器人、避障机器人、遥控汽车等课题。
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
本着从简到繁的原则,我们首先来制作一款由数字电路来控制的智能循迹小车,在组装过程中我们不但能熟悉机械原理还能逐步学习到:光电传感器、电压比较器、电机驱动电路等相关电子知识。
下面我们先来熟悉一下三个主要器件:
光敏电阻器件
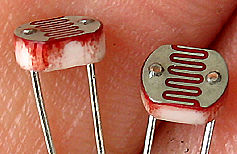
这就是光敏电阻,它能够检测外界光线的强弱,外界光线越强光敏电阻的阻值越小,外界光线越弱阻值越大,当红色LED光投射到白色区域和黑色跑道时因为反光率的不同,光敏电阻的阻值会发生明显区别,便于后续电路进行控制。
LM393比较器集成电路
LM393是双路电压比较器集成电路,由两个独立的精密电压比较器构成。它的作用是比较两个输入电压,根据两路输入电压的高低改变输出电压的高低。输出有两种状态:接近开路或者下拉接近低电平,LM393采用集电极开路输出,所以必须加上拉电阻才能输出高电平。
带减速齿轮的直流电机
直流电机驱动小车的话必须要减速,否则转速过高的话小车跑得太快根本也来不及控制,而且未经减速的话转矩太小甚至跑不起来,我们专门定做的这种电机已经集成了减速齿轮大大降低了制作难度非常适合我们使用。
首先我们来熟悉一下整机的工作原理图,LM393随时比较着两路光敏电阻的大小,当出现不平衡时(例如一侧压黑色跑道)立即控制一侧电机停转,另一侧电机加速旋转,从而使小车修正方向,恢复到正确的方向上,整个过程是一个闭环控制,因此能快速灵敏地控制。

组装步骤:
第一步:电路部分基本焊接
电路焊接部分比较简单,焊接顺序按照元件高度从低到高的原则,首先焊接8个电阻,焊接时务必用万用表确认阻值是否正确,焊接有极性的元件如三极管、绿色指示灯、电解电容务必分清楚极性尽量参考我们图片的元件方向焊接,焊接电容时引脚短的是负极插入PCB丝印上阴影的一侧,焊接绿色LED时注意引脚长的是正极,并且焊接时间不能太长否则容易焊坏,D4 D5 R13 R14 可以暂时不焊,集成电路芯片可以不插,初步焊接完成后请务必细心核对,防止粗心大意。
第二步:机械组装
将万向轮螺丝穿入PCB孔中,并旋入万向轮螺母和万向轮。电池盒通过双面胶贴在PCB上,引出线穿过PCB预留孔焊接到PCB上,红线接3V正电源,黄线接地,多余的引线可以用于电机连线。

机械部分组装可以先组装轮子,轮子由三片黑色亚克力轮片组成,装配前请将保护膜揭去,*内侧的轮片中心孔是长园孔,中间的轮片直径比较小,外侧的轮片中心孔是园的,用两个螺丝螺母固定好三片轮片,并用黑色的自攻螺丝固定在电机的转轴上,*后将硅胶轮胎套在车轮上。用引线连接好电机引线,*后将车轮组件用不干胶粘贴在PCB制定位置,注意车轮和PCB边缘保持足够的间隙,将电机引线焊接到PCB上,注意引线适当留长一些,防止电机旋转方向错误后便于调换引线的顺序。
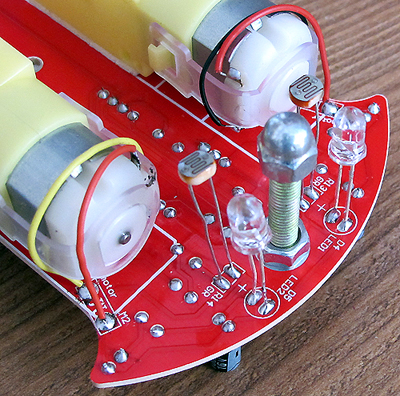
第三步:安装光电回路
光敏电阻和发光二极管(注意极性)是反向安装在PCB上的,和地面间距约5毫米左右,光敏电阻和发光二极管之间距离也在5毫米左右。*后可以通电测试,
第四步:整车调试
在电池盒内装入2节AA电池,开关拨在“ON”位置上,小车正确的行驶反相是沿万向轮方向行驶,如果按住左边的光敏电阻,小车的右侧的车轮应该转动,按住右边的光敏电阻,小车的左侧的车轮应该转动,如果小车后退行驶可以同时交换两个电机的接线,如果一侧正常另一侧后退,只要交换后退一侧电机接线即可。
注意事项:
组装说明书的背面就是循迹小车的简易跑道,客户也可以直接用1.5~2.0厘米黑色的电工胶带直接粘贴在地面上设计成复杂的跑道就更好玩了。
- 6ES7512-1CK01-0AB0参数 2023-10-26
- 6ES7511-1CK01-0AB0参数 2023-10-26
- 6ES7511-1AK02-0AB0参数 2023-10-26
- 西门子CPU模块6ES7507-0RA00-0AB0 2023-10-26
- 西门子CPU模块6ES7505-0KA00-0AB0 2023-10-26
- 西门子CPU模块6ES7505-0RA00-0AB0 2023-10-26
- 西门子CPU模块6ES7516-3AN02-0AB0 2023-10-26
- 西门子CPU模块6ES7515-2AM02-0AB0 2023-10-26
- 西门子CPU模块6ES7513-1AL02-0AB0 2023-10-26
- 西门子CPU模块6ES7512-1DK01-0AB0 2023-10-26